| stm32 驱动ADXL345传感器例程(IIC驱动,可自行改SPI方式) | 您所在的位置:网站首页 › 计步算法 stm32 › stm32 驱动ADXL345传感器例程(IIC驱动,可自行改SPI方式) |
stm32 驱动ADXL345传感器例程(IIC驱动,可自行改SPI方式)
|
stm32 驱动ADXL345传感器例程(IIC驱动,可自行改SPI方式)
前言一、介绍ADXL345传感器二、STM32驱动使用步骤1.配置IIC通信协议2.寄存器初始化配置3.读入数据串口打印
三、成果输出
前言
本项目基于STM32F103C8T6平台驱动ADXL345模块,主要用于三轴加速度的测量,也可用于平衡性检测,跌倒检测,PID控制等领域。 大多数博客的代码带入都不能使用,经过一上午调试,终于可以获取数据了。目前可通过IIC方式驱动(当然自己可以修改成SPI驱动,因为感觉IIC驱动节约一些引脚,当然有利有弊)获取x,y,z三个方向的变化量。现在将程序工程分享出来大家一起交流学习。 温馨提示:若存在表述错误或知识性错误望海涵指出,仅供学习交流,非作者同意不可转载,感谢支持吖~ 一、介绍ADXL345传感器ADXL345是三轴加速度传感器,根据官方网站以及官方手册(https://www.analog.com/cn/products/adxl345.html#product-overview)上的描述,它具有以下特性: 1、超低功耗:VS = 2.5 V时(典型值),测量模式下低至23μA,待机模式下为0.1 μA 2、功耗随带宽自动按比例变化 3、用户可选的分辨率:10位固定分辨率/全分辨率 分辨率随g范围提高而提高,±16 g时达到最高分辨率13位(在所有g范围内保持4 mg/LSB的比例系数) 使用的模块如下图:ADXL345(GY-291) 根据参考手册可知,引脚号分配: 那么就简要介绍以下寄存器,它的寄存器很多,但是我们只需要先关注以下三个即可 可以使用硬件iic也可使用软件iic,我这里为了方便就用硬件配置了: //配置GPIO的复用模式 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; GPIO_Init(GPIOB,&GPIO_InitStructure); //配置IIC的外设工作条件 I2C_DeInit(I2C2); I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; I2C_InitStructure.I2C_OwnAddress1 = 0x30; I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; I2C_InitStructure.I2C_ClockSpeed = 200000; 2.寄存器初始化配置 void adxl345_init(void) { iic_rw(0x0d, 1, BW_RATE, ADXL345_ADDR, WRITE);//数据速率以及功率模式配置 iic_rw(0x08, 1, POWER_CTL, ADXL345_ADDR, WRITE);//省电特性配置 iic_rw(0x09, 1, DATA_FORMAT, ADXL345_ADDR, WRITE);//数据格式控制 } 3.读入数据串口打印通过读寄存器的值来读取此时三轴加速度三方位的状态(这里是通过16位的数据格式获取,大家可配置,最大值为65535,将读取的数值转化为16位整型数据): void adxl345_get_data(u16 *aax, u16 *aay, u16 *aaz) { u8 data_rev[6]; iic_rw(&data_buf[0], 6, ADXL345_BURST_ADDR, ADXL345_ADDR, READ); *aax = data_rev[1] * 0x100 + data_rev[0]; *aay = data_rev[3] * 0x100 + data_rev[2]; *aaz = data_rev[5] * 0x100 + data_rev[4]; } adxl345_get_data(x_temp, y_temp,z_temp); printf("x is %d,y is %d,z is %d \r\n",*x_temp,*y_temp,*z_temp);获取x,y,z的值将其串口打印。 三、成果输出
通过更改ADXL345模块方位,摇晃等,可以明显看出xyz发送了改变,说明我们已经驱动ADXL345模块,同时能获取相关数据。可后期对该数据进行采集,平均值,卡尔曼滤波等处理,使得更加稳定。 CSDN工程下载链接(已调试通过):https://download.csdn.net/download/qq_40249327/16822565 |



 根据官方手册可知,通信方式可参考下表:
根据官方手册可知,通信方式可参考下表: 
 说明:CS接入高电平则选择IIC通信,反之则SPI通信。SDO(地址引脚)接入高电平,根据手册器件的7位I2C地址是0x1D,后面跟上读取/写入位(R/W),则写寄存器为0x3A,读寄存器为0x3B;接入低电平,则7位I2C地址是0x53,同理,跟上读写标志位后写寄存器为0xA6,读寄存器为0xA7;
说明:CS接入高电平则选择IIC通信,反之则SPI通信。SDO(地址引脚)接入高电平,根据手册器件的7位I2C地址是0x1D,后面跟上读取/写入位(R/W),则写寄存器为0x3A,读寄存器为0x3B;接入低电平,则7位I2C地址是0x53,同理,跟上读写标志位后写寄存器为0xA6,读寄存器为0xA7;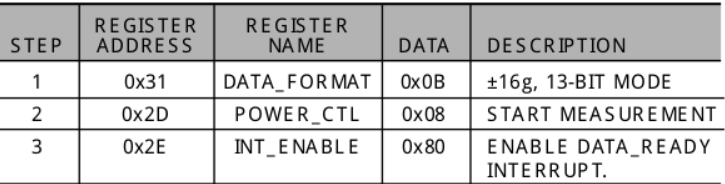 只需要配置好这三个寄存器就可以开始工作,其余寄存器如下图(读取数据关注0x32开始的6个寄存器即可):
只需要配置好这三个寄存器就可以开始工作,其余寄存器如下图(读取数据关注0x32开始的6个寄存器即可): 



【本文地址】